|
|
工业机器人交流伺服驱动控制系统硬件设计工业机器人交流伺服驱动控制系统的硬件进行设计说明。简单说明了选择TMS320F2812芯片的原因,并完成了工业机器人伺服驱动系统的硬件设计中位置检测电路、低速外部输入信号转化电路、智能功率模块及隔离驱动电路的设计,为工业机器人伺服驱动系统的设计奠定了硬件基础。 0 引言 从二十世纪七十年代起至今,我国的工业机器人数量已经比较庞大,在机器人的某些技术方面也达到了世界先进水平,但总体来说,西方发达国家的工业机器人技术仍领先我国很多年。究其原因不难发现:我国研究工业机器人采取的方法主要是首先引进外国的先进技术,然后再对其进行二次开发,这就造成了我国自身创新技术比较少,严重制约了我国工业机器人产业化的发展。为打破国外对我国工业机器人的技术垄断,我们必须自力更生,掌握高性能工业机器人的关键技术,并在原来的基础上有所创新。由于工业机器人关节的执行器为电机,所以获得电机的良好控制效果是非常重要的,要想获得优良的电机控制性能,就需要高性能的交流伺服驱动系统,因此研制高性能的交流伺服驱动系统是工业机器人的关键技术之一。 交流伺服驱动系统的硬件是软件设计的基础,所以本文的主要任务是根据工业机器人伺服驱动系统的特点,对系统的的硬件进行设计,系统硬件的框图如图1所示。 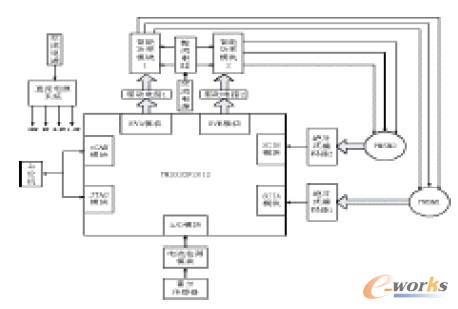 图1 系统的硬件框图 1 硬件设计 1.1 DSP的选型 DSP系统硬件设计包括控制芯片的选择、主电路的驱动与保护、外围设备、逻辑电路等,它是整个控制系统设计的基础,DSP芯片又是重中之重。TMS320C5000系列DSP具有最低功耗的特点,是专门针对消费类数字市场而设计的,最低耗电只有0.33mA/MHz,所以多应用于日常生活中的消费产品,如照相机、手机等。TI公司的TMS320C6000系列拥有最高的处理能力,是一种适合采用C++/C等高级语言进行编程的数字处理器,主要应用在军事国防等高端领域。与C5000和C6000系列的DSP相比,TMS320C2000系列的DSP由于其具有速度快、精度高、集成度高等优点,是目前控制领域性能最高的处理器。其中,C28系列DSP是TMS320C2000平台中的新成员,它由C24系列DSP改进而来,是一款支持C/C++语言设计的芯片,C28系列DSP非常适合于工业控制,在算法控制上有独到的优势,是一款不可多得的微处理器,它的高效性可以使它代替任何其他处理器。C2000系列DSP不含Flash存储器,仅含只读存储器ROM;F2000系列DSP不仅内含ROM只读存储器,而且还包括Flash存储器,可以反复擦写,适合应用在产品的初期开发阶段。若采用TMS320C281x,则需要将代码交付生产厂商,把程序固化到TMS320C281x的ROM中,增加了成本,所以选择使用TMS320F281x DSP芯片。其中,TMS320F2812作为TI公司首推的芯片,具有很高的性价比。综上所述,最终选择DSP的型号为TMS320F2812。 1.2 位置检测电路设计 本文交流伺服电机中所采用的编码器为多摩川公司生产的型号为TS5668N21的17位绝对式编码器,一般的做法是采用生产厂商提供的专用芯片进行数据处理,但该做法有一个缺点,就是专用芯片的成本十分昂贵,与本文需要研制经济型的工业机器人宗旨相违背,为了降低成本,本文自己设计了将绝对式编码器信号转变为DSP能识别的串口信号电路,如图2所示。  图2 位置检测电路 图2中的电感与光耦可以起到滤波和防浪涌的功能,由于该绝对式编码器输出的是差动信号,所以需要通过芯片SN65176BD(BDR)G4将绝对式编码器的差动信号转化为DSP可以识别的串口信号,即TTL信号,此外该芯片的供电电压为直流5V,所以该驱动系统还应该提供5V的直流电源,由于该工业机器人伺服驱动系统采用了利用一个DSP来控制两个永磁同步电机的想法,好处是降低成本,充分发挥了TMS320F2812的运算速度快及外设资源丰富的特点,所以两个电机的编码器信号分别通过串口SCIA和SCIB输入到同一个DSPTMS320F2812中。 责编:李玉琴  微信扫一扫实时了解行业动态 微信扫一扫实时了解行业动态 著作权声明:kaiyun体育官方人口
文章著作权分属kaiyun体育官方人口
、网友和合作伙伴,部分非原创文章作者信息可能有所缺失,如需补充或修改请与我们联系,工作人员会在1个工作日内配合处理。 |
最新专题 专家专栏 |











|
|

